{
"metadata": {
"total_frames": 299,
"consolidation_timestamp": "2025-10-22T21:47:43.883911",
"source_directory": "/Users/mad-khalid/Downloads/WhisperMind_RoboData_V3 2"
},
"frames": {
"1": {
"frame_number": 1,
"frame_directory": "frame_1",
"json_file": "frame_1.json",
"data": {
"id": "797463b9-e622-44ae-ba1d-b9fc86127570",
"batch_id": "7c03d287262e",
"dataset_url": "https://storage.googleapis.com/customer-ss-flow-assets/whispermind/batch-001/vid_001/whispermind_clip_0010_0020.mp4",
"cvat_annotations": {
"annotations": {
"tracks": [
{
"id": 105950,
"label_id": 300359,
"frame": 1,
"group": 0,
"source": "manual",
"shapes": [
{
"id": 106757,
"type": "polygon",
"frame": 0,
"occluded": false,
"outside": false,
"z_order": -2,
"rotation": 0,
"points": [
2264.005859375,
3592.41015625,
2256.32017301059,
3623.1504579223583,
2274.983719069627,
3765.871692491459,
2317.800089440356,
3998.617090404143,
2411.1178197355366,
4511.315679202373,
2501.1419830791237,
5066.830638371332,
2528.588374342413,
5199.671172085647,
2568.111177761548,
5265.542511117539,
2618.612537686,
5314.946015391459,
2664.7224750083224,
5330.315994498902,
3247.68382544057,
5233.704697252124,
4320,
5058.432713390128,
4320,
4017.784628067737,
3961.2000000000007,
3479,
3853.700144533981,
3346.4908339884096,
3351.980112241068,
3412.3621730203013,
2411.1178197355366,
3526.53916067558,
2296.9408320802577,
3552.887696288337
],
"attributes": [],
"label": null
}
],
"attributes": [],
"elements": [],
"label": {
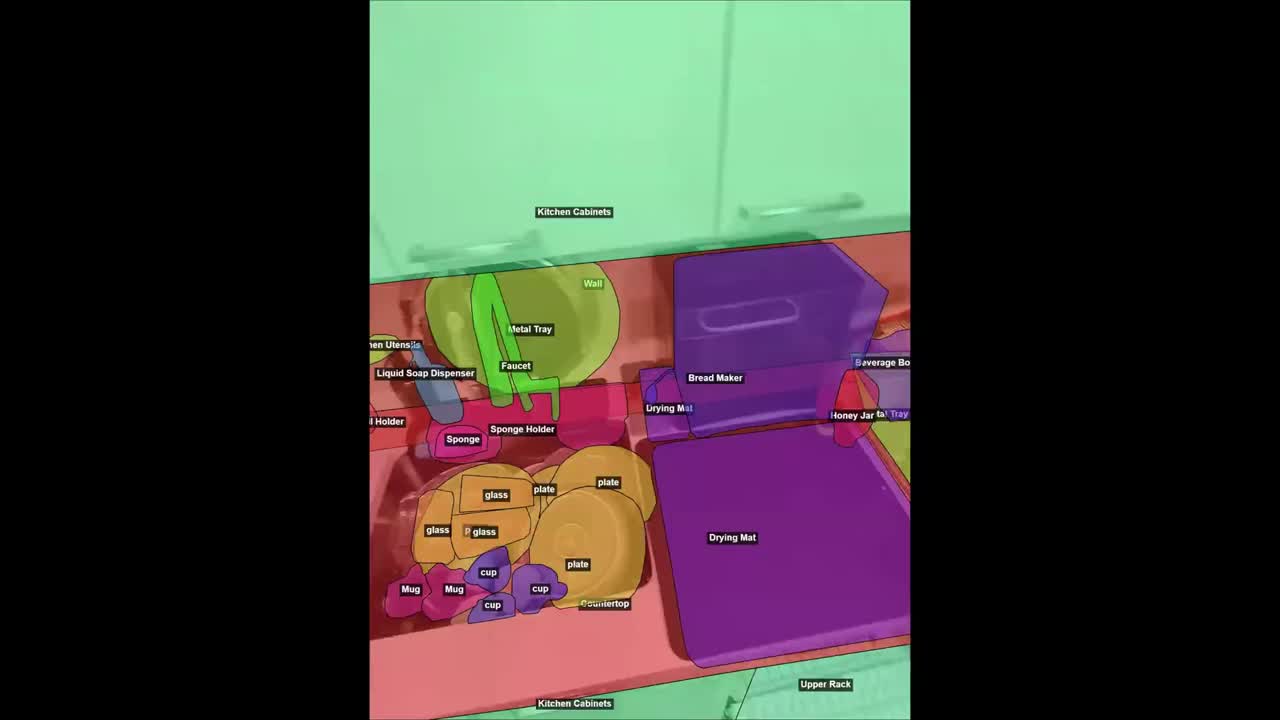
"name": "Drying Mat",
"id": 300359,
"color": "#f50000",
"type": "any",
"attributes": [
{
"name": "grip_force_min",
"value": "1.8",
"type": "number"
},
{
"name": "grip_force_max",
"value": "3.6",
"type": "number"
},
{
"name": "grasp_type",
"value": "precision",
"type": "text"
},
{
"name": "manipulation_difficulty",
"value": "1",
"type": "number"
},
{
"name": "object_weight",
"value": "0.1",
"type": "number"
}
]
},
"robotics_attributes": {
"grip_force": {
"min": 1.9,
"max": 3.7,
"unit": "N"
},
"hand_orientation": {
"roll": -4.3,
"pitch": -3.1,
"yaw": 1.9
},
"object_weight": {
"value": 0.1,
"unit": "kg"
},
"grasp_type": "precision",
"material_properties": {
"surface": "textured",
"texture": "fabric",
"friction": 0.9
},
"manipulation_difficulty": 1,
"safety_requirements": [
"flexible_object"
],
"center_of_mass": {
"x": 0.0,
"y": 0.0,
"z": 0.011
}

%202.png)